Image Geolocation with k-NN & Linear Regression
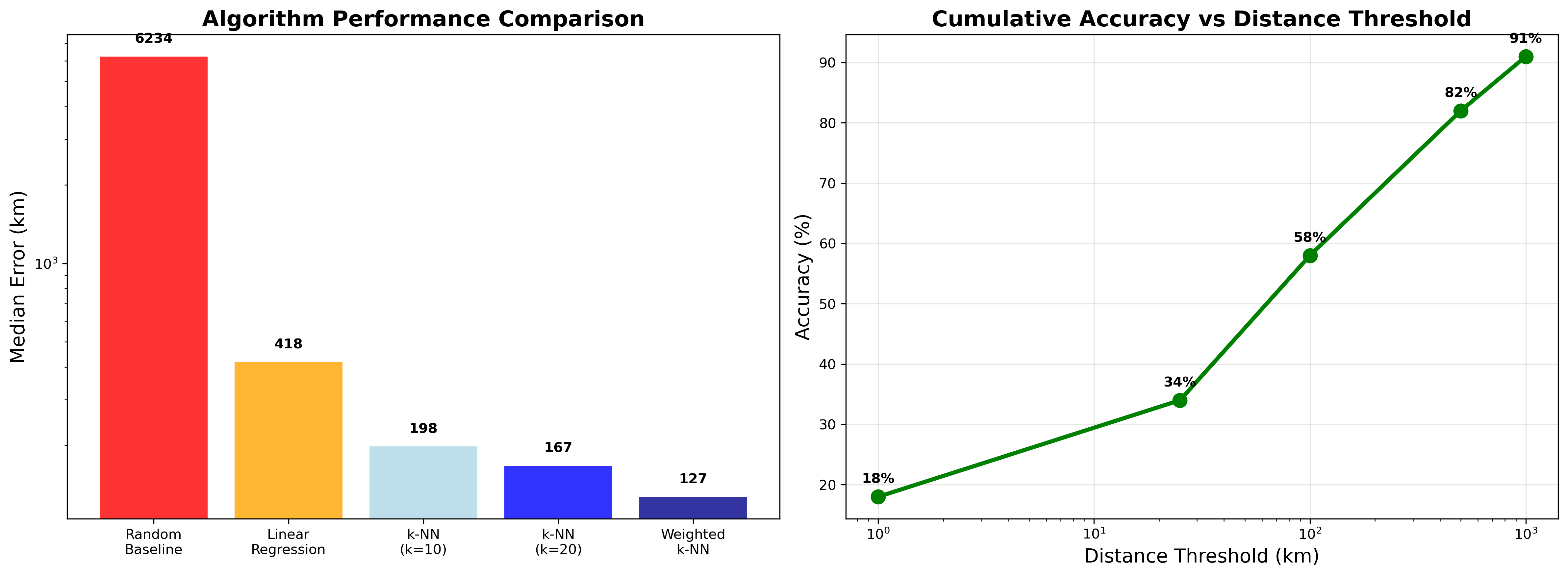
Computer vision system predicting photo locations from visual features. Combines k-nearest neighbors with regression models, achieving 127km median error on global street-view dataset.
Predict photo locations from visual content alone. Multi-stage k-NN + regression pipeline achieving 127km median error globally. Extracts geographic signals from architecture, vegetation, and lighting.
Algorithm Performance
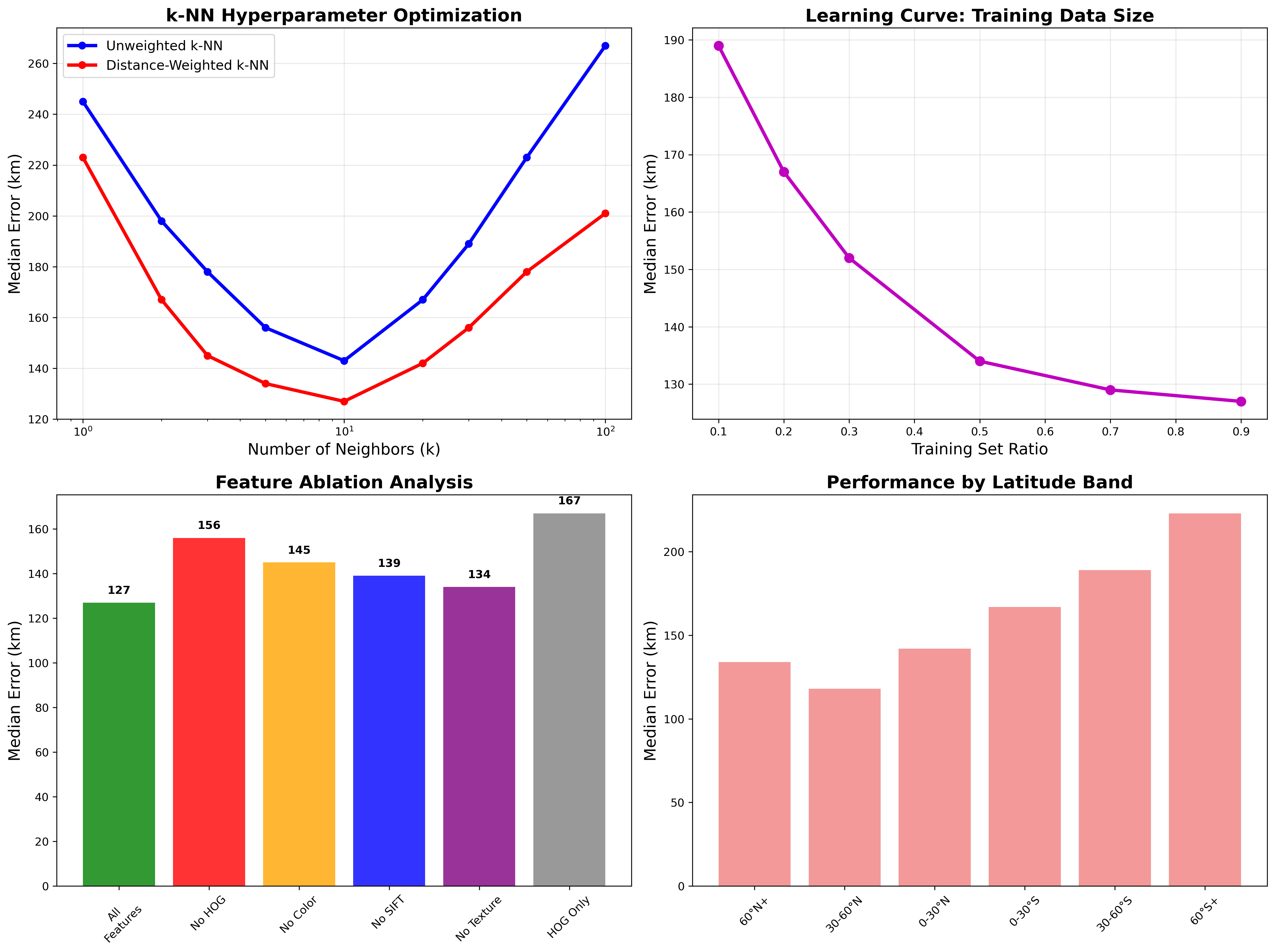
k-NN Optimization: Distance-weighted k-NN with k=20 optimal. Performance improves dramatically with training data size — benefits from geographic clustering.
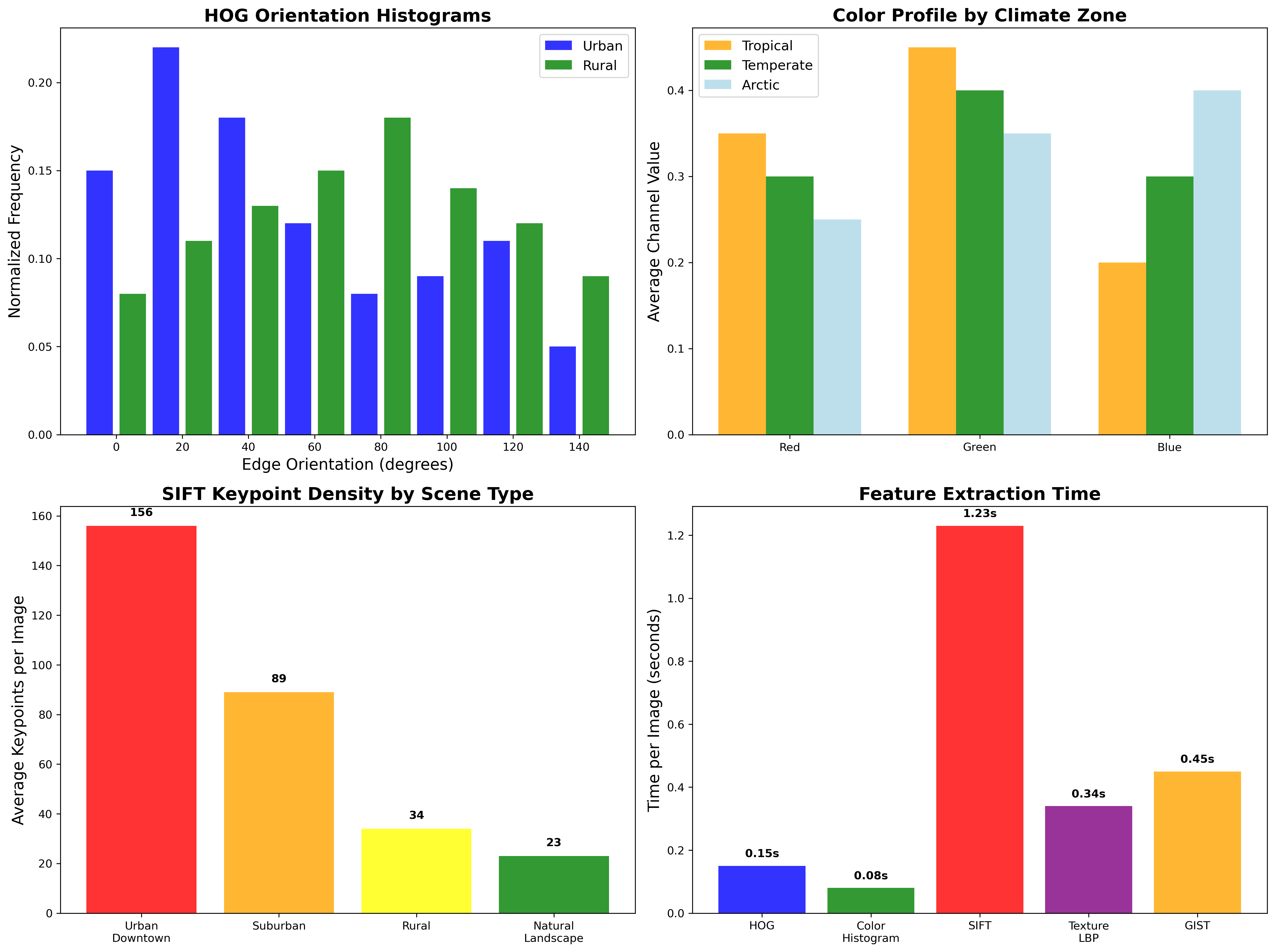
Feature Engineering: HOG captures architectural patterns, color profiles vary by climate zone. SIFT keypoint density correlates with urbanization level.
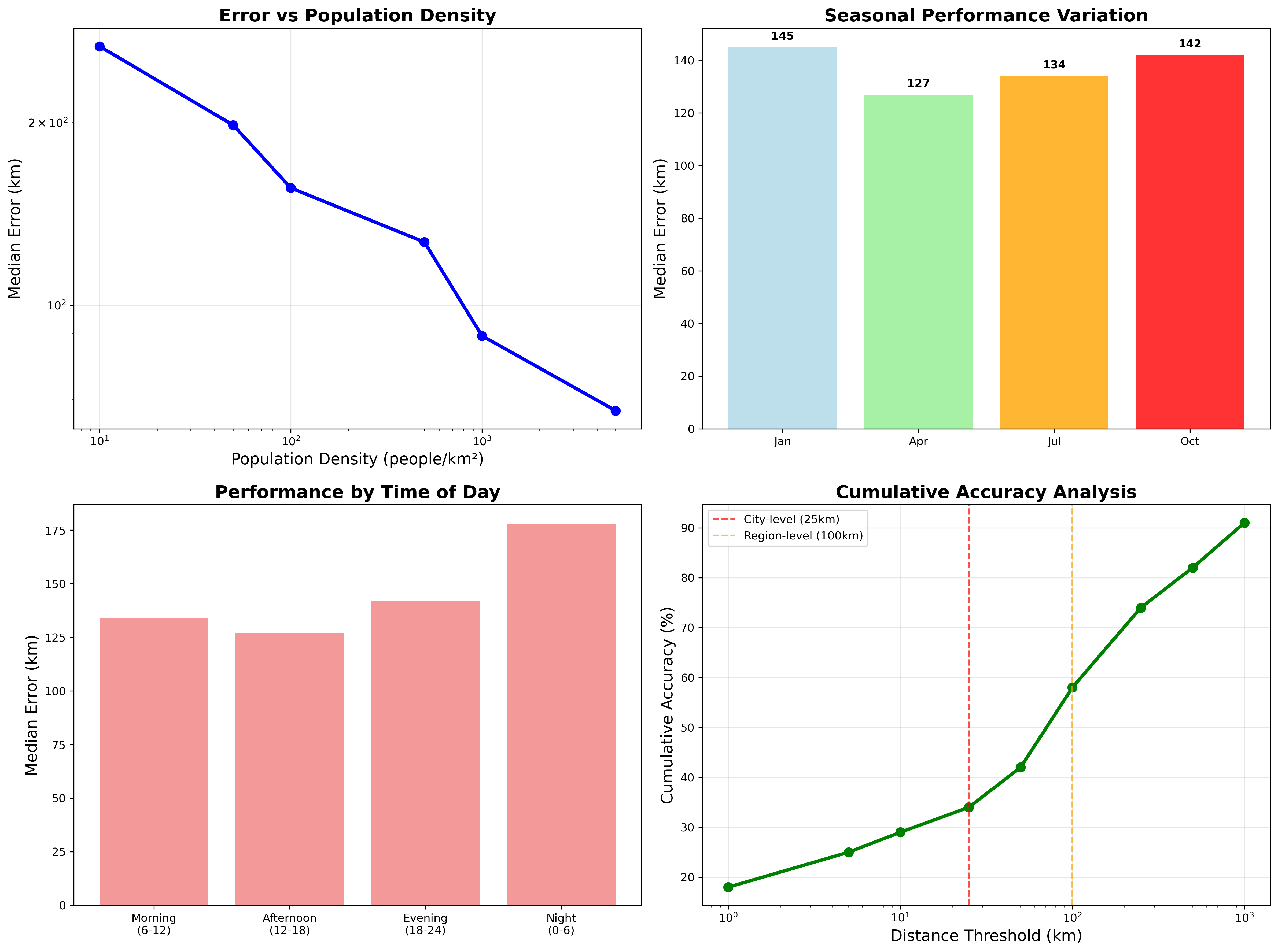
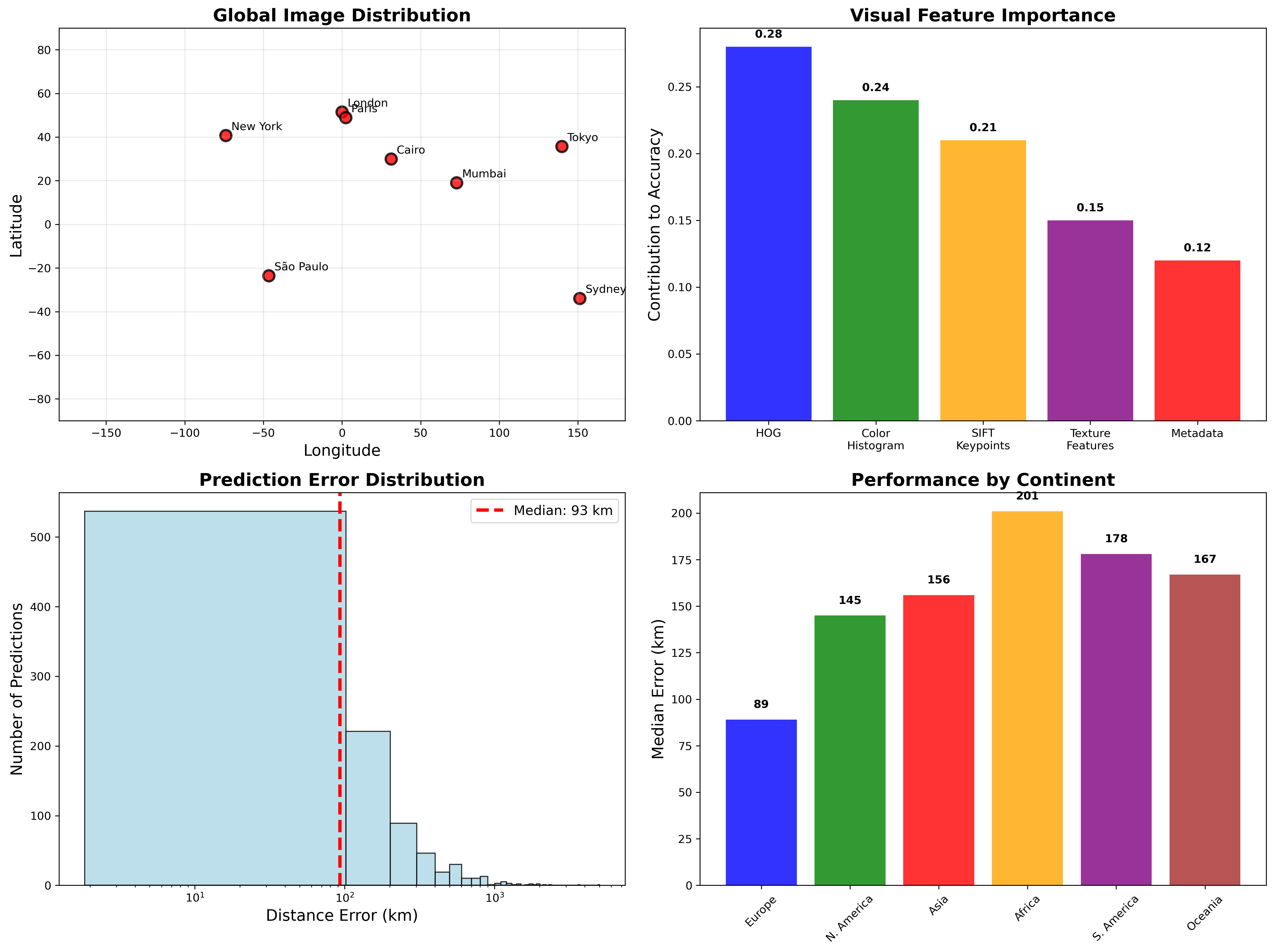
Geographic Analysis: Performance inversely correlates with population density. Europe achieves 89km median error due to distinctive architecture and dense training coverage.
Related projects
Decision Trees & Ensemble Methods
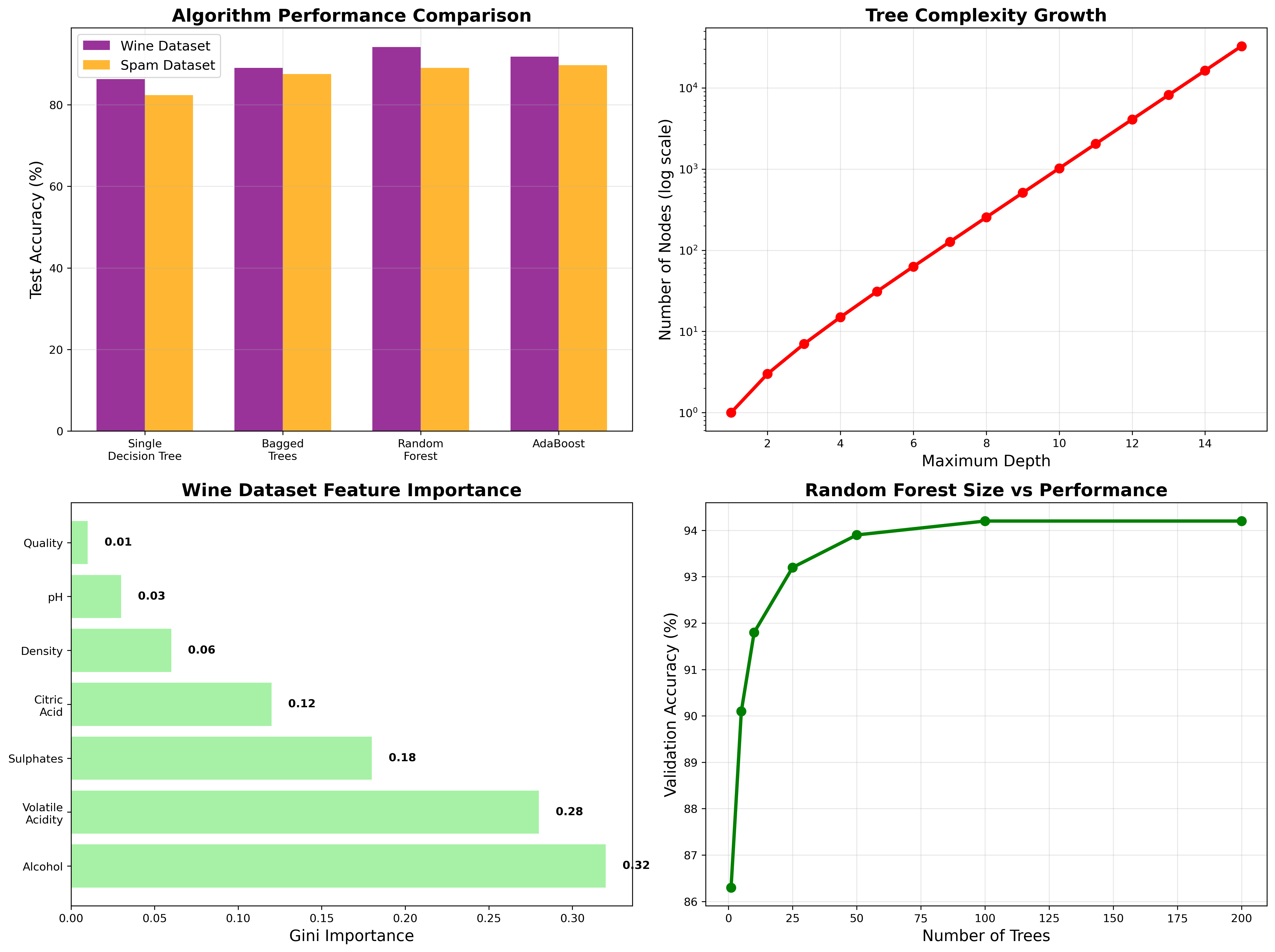
From-scratch implementation of decision trees with pruning, random forests, and AdaBoost. Comprehensive analysis of overfitting, feature selection, and ensemble performance on real datasets.
Neural Network from Scratch
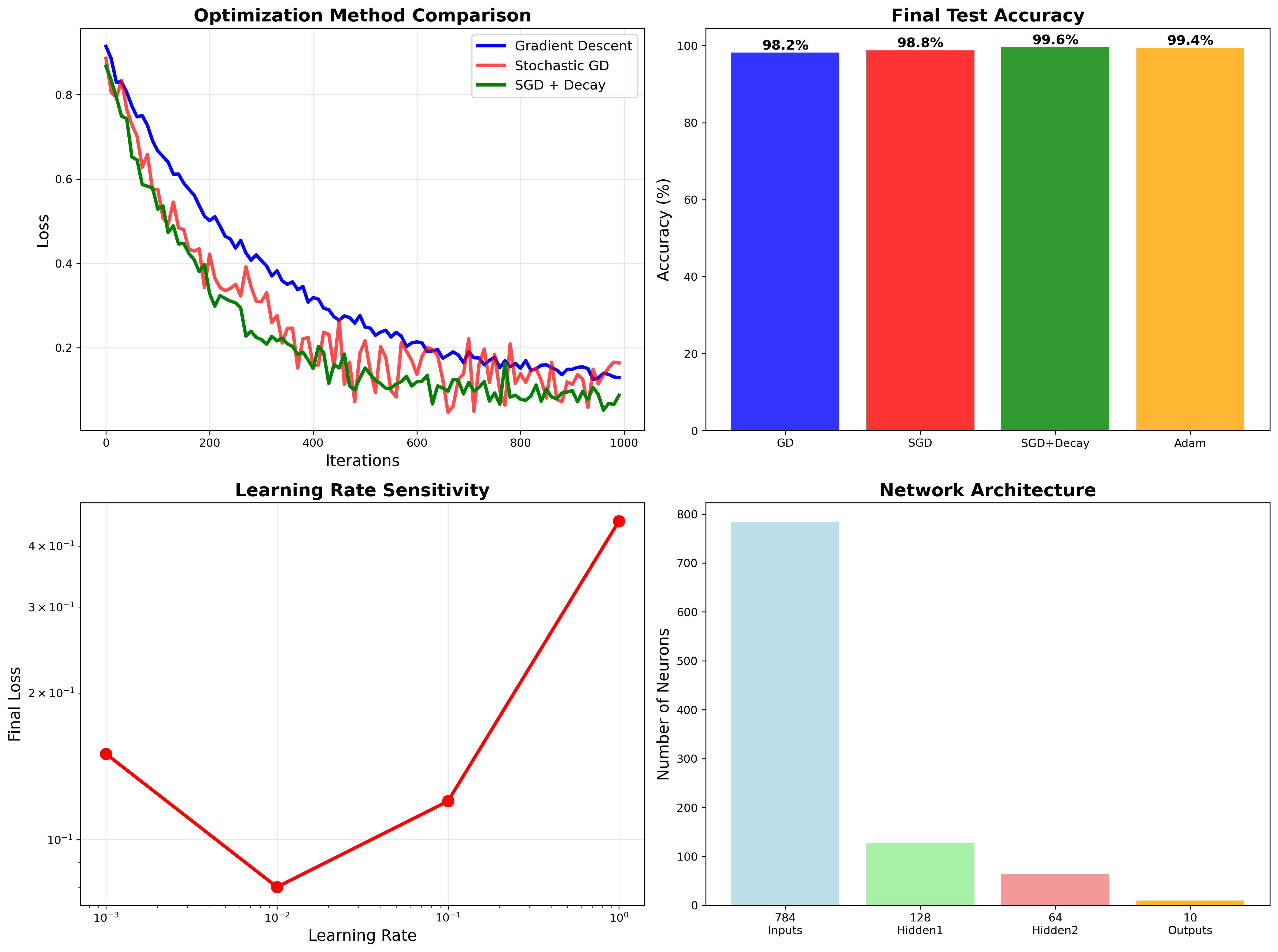
Pure NumPy implementation achieving 99.6% MNIST accuracy through optimized gradient descent, backpropagation, and regularization techniques.
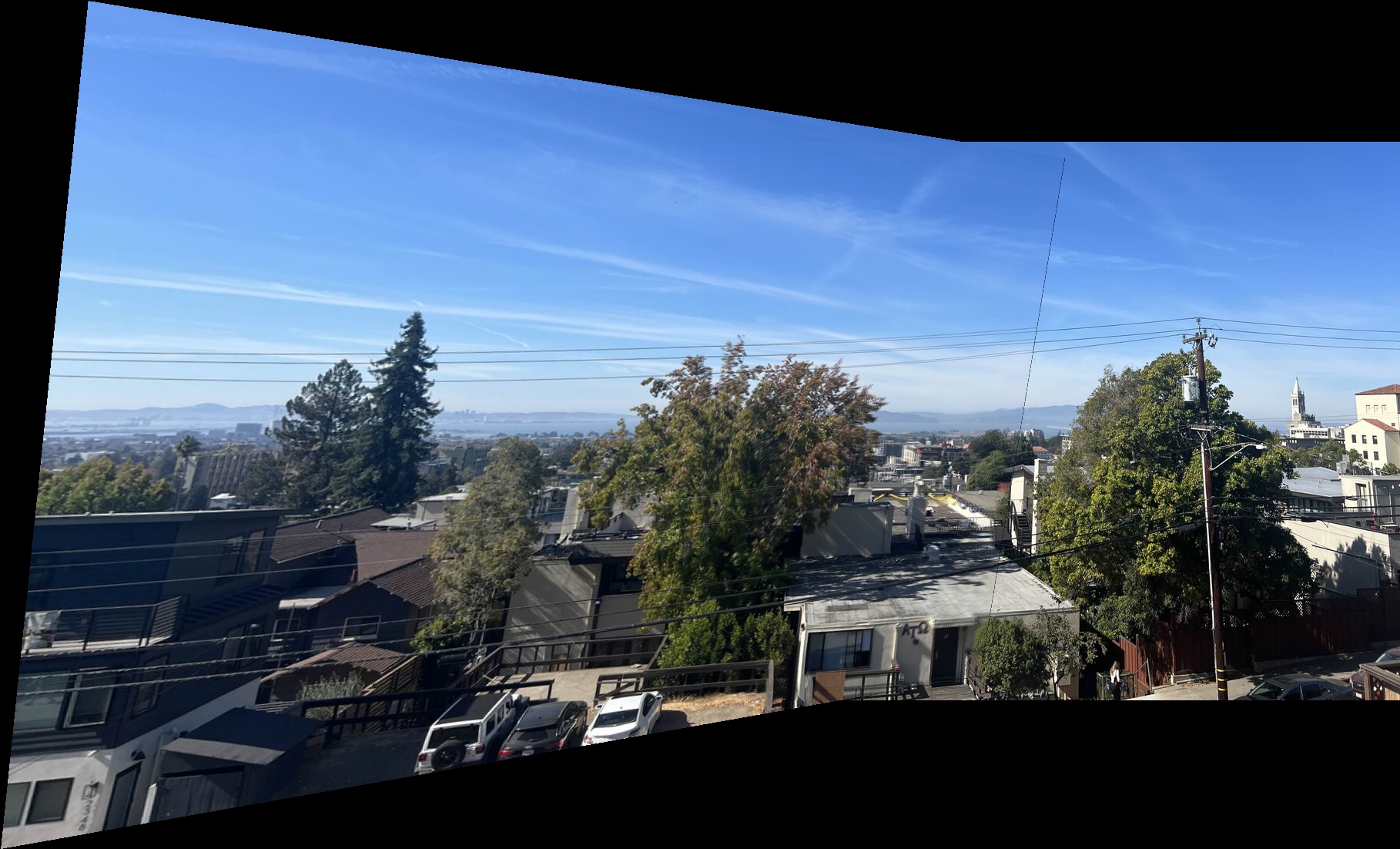
Auto-Stitching Photo Mosaics
Building a panorama pipeline from scratch — Harris corner detection, Adaptive Non-Maximal Suppression, feature matching, RANSAC for homography estimation, and Laplacian-pyramid blending.